
STA-B0610X to moduł pomiaru odległości z bezpiecznym dla oka modułem dalmierza laserowego (LRF) o zasięgu 6 km, który może wykryć odległość do celu i przesłać zmierzoną odległość do górnego komputera za pośrednictwem komunikacji szeregowej. Widoczność ≥ 15 km, współczynnik odbicia celu ≥ 0,3, wilgotność ≤ 80%, odległość pojazdu (cel NATO 2,3 m × 2,3 m) ≥ 6 km; Maksymalny zasięg ≥ 10 km.
(1) Zakres pojedynczy i zakres ciągły;
(2) Reaguje na polecenia dotyczące odległości lasera i może zatrzymać namierzanie w dowolnym momencie zgodnie z poleceniem zatrzymania;
(3) Wyprowadzanie danych o odległości i informacji o stanie raz na impuls podczas pomiaru odległości;
(4) Może raportować skumulowaną liczbę przesłanych impulsów laserowych (bez utraty mocy);
(5) Wybór odległości, wskazanie celu przedniego i tylnego;
(6) Funkcja autotestu.
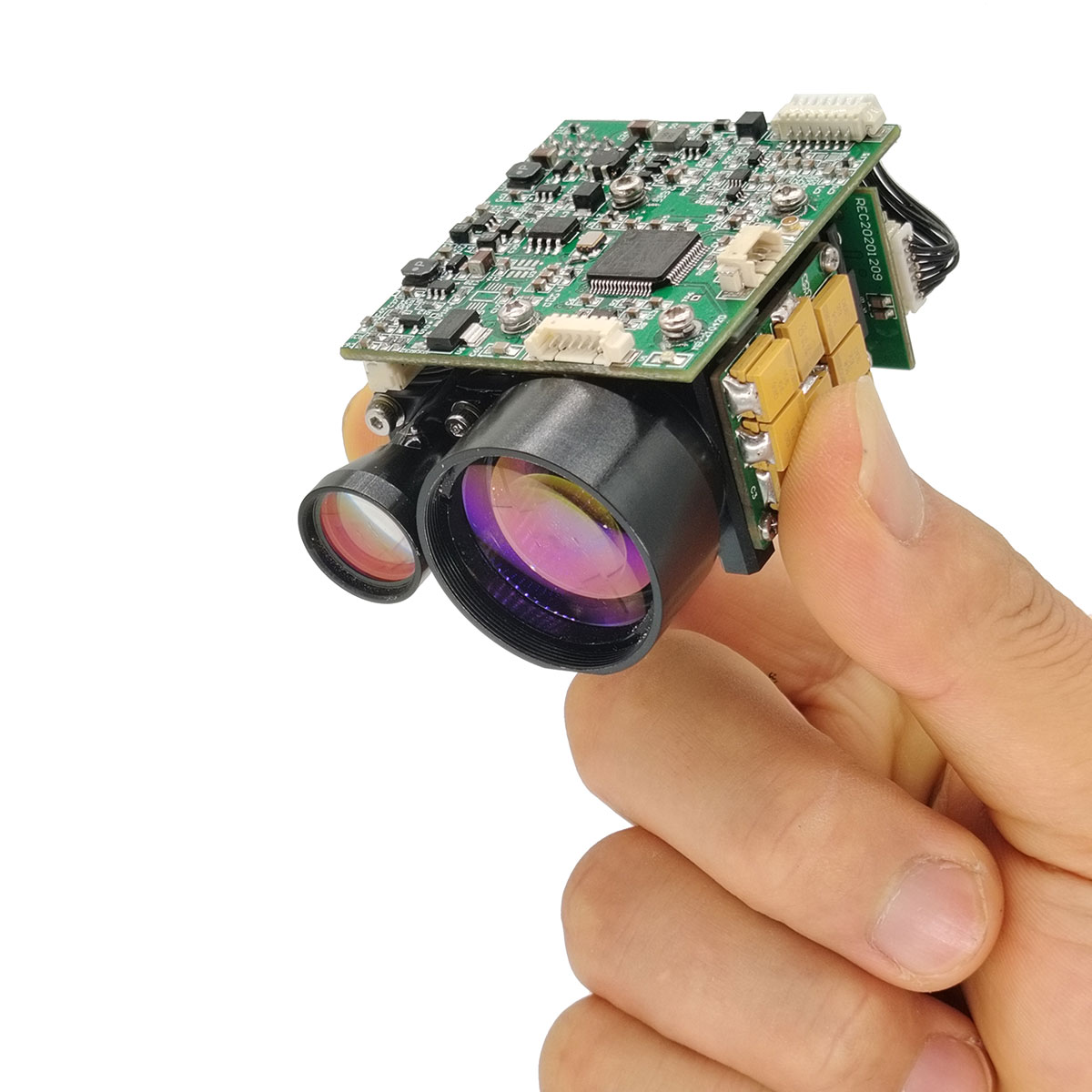
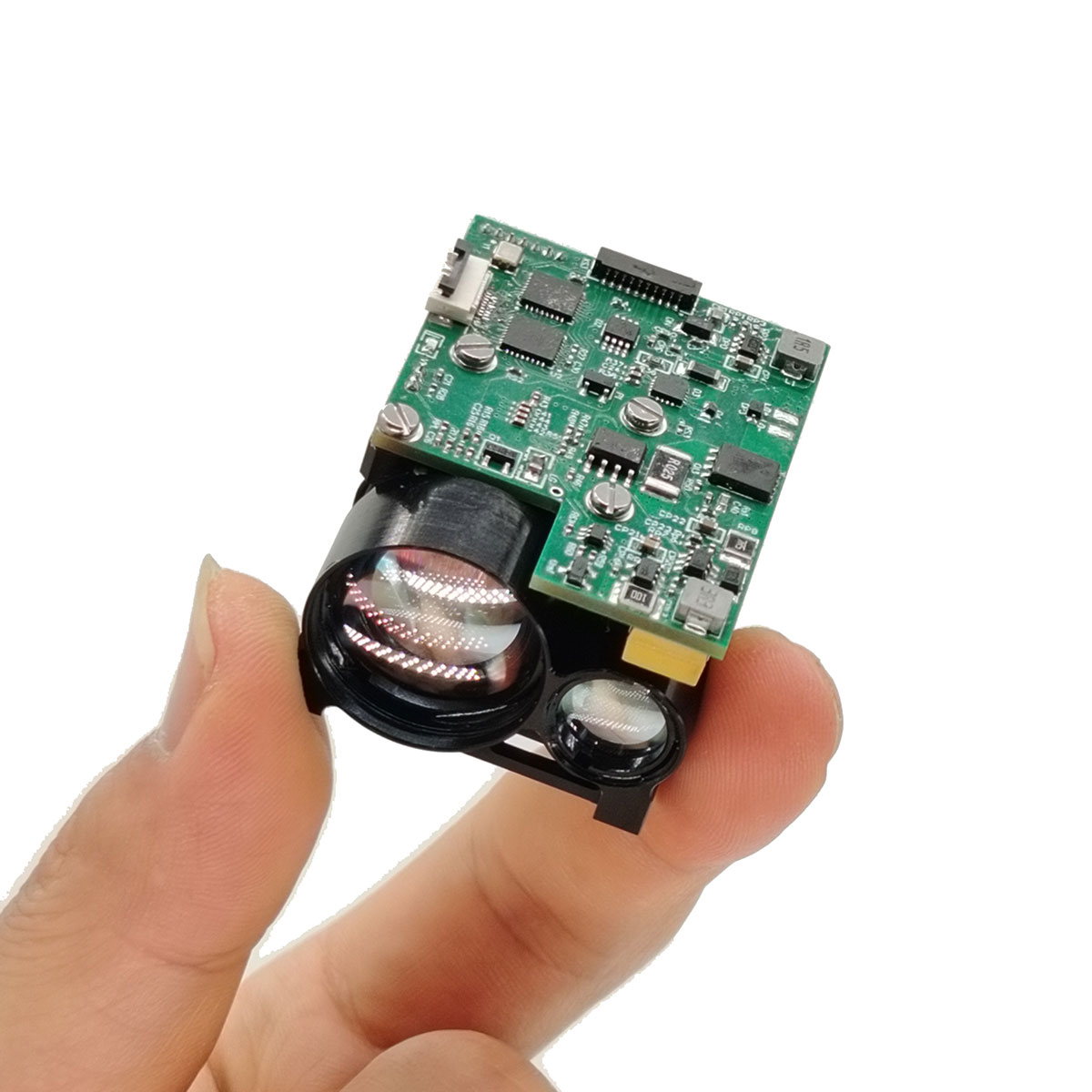
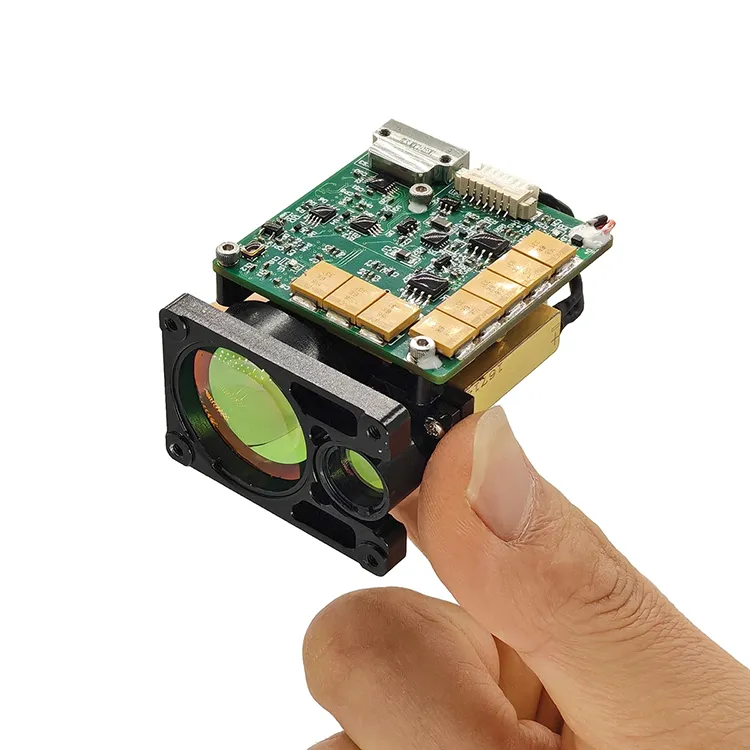
Moduł dalmierza laserowego B0610X to wojskowy dalmierz laserowy impulsowy przeznaczony do zastosowań takich jak samoloty, bezzałogowe statki powietrzne, czołgi i lunety. Bezpieczny dla oka moduł dalmierza laserowego (LRF) o zasięgu 6 km ma niewielkie rozmiary, niewielką wagę, niskie zużycie energii, stabilną pracę, dużą odległość pomiaru i długą żywotność, bezpieczeństwo ludzkiego oka i inne zalety. Jest to ważne wyposażenie techniczne poprawiające dokładność celowania produktu.
Indeks wydajności produktu dla bezpiecznego dla oczu modułu LRF B0610X
| Przedmiot | Parametr techniczny | Instrukcja |
| Model | STA-B0610X | |
| Robocza długość fali | 1535 ± 5 nm | |
| Bezpieczeństwo oczu | Klasa 1 (IEC 60825-1) | |
| Przysłona odbiorcza | Φ25mm | |
| Otwór emisyjny | Φ14mm | |
| Możliwości zasięgowe | 50m-8000m | |
| Zakres zasięgu | ≥10000 m | Maksymalny zasięg, widoczność obserwatora 25 km |
| ≥8000 m | Budowanie celów, Odbicie: 0,6, widoczność obserwatora 25 km | |
| ≥6000m | Cel NATO | |
| ≥3000m | Cel ludzki | |
| ≥1000m | Cel UAV | |
| Mini-zakres | 50 m | |
| Wykrywanie wielu celów | Do 3 celów | |
| Dokładność zasięgu | ±1 m | 3δ |
| Częstotliwość wahania | Regulacja w zakresie 1~10 Hz | |
| Wskaźnik dokładności | ≥98% | |
| Liczba fałszywych alarmów | 1% | |
| Kąt rozbieżności | ≤0,5 mrada | |
| Interfejs komunikacyjny | RS422 | Interfejs TTL/RS232 można dostosować |
| Woltaż | 5 ~ 12 V | |
| Moc robocza | ≤1,2 W(@1 Hz) | Test normalnej temperatury |
| moc w trybie gotowości | ≤0,5 W | Używanie pinu PWR EN, tryb gotowości 0,1 W |
| Wstrząs mechaniczny | 75 g, 1 ms | |
| Temperatura pracy | -40 ℃ ~ + 60 ℃ | |
| Temperatura przechowywania | -45 ℃ ~ + 70 ℃ | |
| Niezawodność | MTBF ≥ 1500h | |
| Rozmiar | ≤65 mm × 35 mm × 44 mm | |
| Waga | ≤75g | |
| Główna funkcja | Pierwszy i ostatni cel pomiaru, Zakres wielu celów, Selektywność odległościowa |
|
Uwagi:
1) cel NATO o wymiarach 2,3 m × 2,3 m; Rozmiar docelowego człowieka 0,5 m × 1,7 m; Rozmiar celu UAV 0,2 m × 0,3 m; Odbicie 30%, widoczność obserwatora ≥ 15 km

| szpilka | definicja | wyjaśnić |
| 1 | GND | Smyczkowy |
| 2 | Moc jest | Zasilanie od 3 do 5 V |
| 3 | UART_NC | (pusty) |
| 4 | UART_TX | Nadajnik portu szeregowego, poziom TTL_3,3V |
| 5 | UART_RX | Strona odbiorcza portu szeregowego o poziomie TTL_3,3 V |
| 6 | ZASILANIE_WŁ | Wyłącznik zasilania modułu, poziom TTL_3,3V; (domyślnie> 0,7 V włączone, <0,15 V wyłączone) |
| Szpilka | Definicja | Funkcjonować | Notatki |
| 1 | RX+ | Odbiornik RS422 + | Niebieski |
| 2 | RX- | Odbiornik RS422 - | Zielony |
| 3 | TX- | Transmisja RS422 - | Fioletowy |
| 4 | TX+ | Transmisja RS422 + | Żółty |
| 5 | GND | Przewód uziemiający komunikacyjny | Biały |
| 6 | VEE | Zasilanie + | Czerwony |
| 7 | GND | Zasilanie - | Czarny |
| 8 | PWR PL | / | Popiół |
Możliwość dostosowania do środowiska
a) temperatura pracy:-40 ℃ ~ + 60 ℃.
b) Temperatura przechowywania:-45 ℃ ~ + 70 ℃.
C) Losowe wibracje:15 ~ 2000 Hz, 3 kierunki. Konkretne warunki badania przedstawiono w tabeli 1.
Tabela 1 Warunki badania losowych wibracji
| Numer seryjny | Zakres częstotliwości (Hz) | Gęstość widmowa przyspieszenia (g2/Hz) | Czas wibracji (min) |
| 1 | 15~190 | 0.01 | Wibracje w każdym kierunku 15 min |
| 2 | 190 ~ 210 | 0.1 | |
| 3 | 210 ~ 380 | 0.01 | |
| 4 | 380 ~ 420 | 0.025 | |
| 5 | 420 ~ 2000 | 0.01 |
Moduły asortymentowe OEM/ODM i rozwiązania niestandardowe
B0610X został zaprojektowany dla integratorów systemów poszukujących wygodnego, wydajnego i kompaktowego rozwiązania do pomiaru odległości laserem. Zapewnia niezawodną wydajność w szerokim zakresie zastosowań.
Jest bardzo mały, ultralekki, ma niski pobór mocy i można go mierzyć na dużą odległość. Nadaje się do urządzeń przenośnych (obrazowanie termowizyjne), zastosowań do montażu broni, systemów przenośnych i lekkich zestawów czujników oraz bezzałogowych statków powietrznych lub UGV.
1. Protokół transmisji: asynchroniczna komunikacja szeregowa;
2. Szybkość portu: 115200;
3. Bity danych: 10 bitów: jeden bit startu, 8 bitów danych, jeden bit stopu, nieważna weryfikacja;
4. Struktura danych: Dane składają się z bajtu nagłówka, części poleceń, długości danych, części parametrów i bajtu kontrolnego;
5. Tryb komunikacji: sterowanie główne wysyła polecenia sterujące do maszyny wyznaczającej odległość, a maszyna wyznaczająca odległość odbiera i wykonuje instrukcje. W stanie ustalania odległości maszyna wyznaczająca odległość wysyła dane i status maszyny wyznaczającej odległość z powrotem do górnego komputera zgodnie z cyklem wyznaczającym. Format komunikacji i treść poleceń przedstawiono w poniższej tabeli.
A) Wysyła główne sterowanie
Format wysyłanej wiadomości jest następujący:
| STX0 | CMD | LEN | DANE 1H | DANE1L | CHK |
Tabela 2 Opis formatu wysyłanej wiadomości
| numer zamówienia | nazwa | wyjaśnić | kod | uwagi |
| 1 | STX0 | Flaga rozpoczęcia wiadomości | A5(H) | |
| 2 | CMD | CW | Patrz tabela 3 | |
| 3 | LEN | DL | Liczba wszystkich bajtów z wyjątkiem znaku początkowego, słowa polecenia i sumy kontrolnej | |
| 4 | DANE | parametr | Patrz tabela 3 | |
| 5 | DANE | |||
| 6 | CHK | Weryfikacja XOR | Z wyjątkiem prawidłowego bajtu, wszystkie pozostałe bajty są poddawane operacji XOR |
Polecenie jest opisane w następujący sposób:
Tabela 3 Opis poleceń i słów danych wysyłanych przez master do maszyny wyznaczającej odległość
| numer zamówienia | CW | funkcjonować | bajt danych | uwagi | długość | Przykładowy kod |
| 1 | 0x00 | przerwać | DATAH=00(H) DANE=00(H) |
Dalmierz przestaje mierzyć | Sześć bajtów | A5 00 02 00 00 A7 |
| 2 | 0x01 | Pojedynczy zakres | DATAH=00(H) DANE=00(H) |
Sześć bajtów | A5 01 02 00 00 A6 | |
| 3 | 0x02 | Ciągłe wahanie | DATAH=XX(H) DANE=YY(H) |
DATA opisuje okres wahań w ms | Sześć bajtów | A5 02 02 03 E8 4E (zakres 1 Hz) |
| 4 | 0x03 | samosprawdzenie | DATAH=00(H) DANE=00(H) |
Sześć bajtów | A5 03 02 00 00 A4 | |
| 5 | 0x04 | Ustaw najbliższą odległość do zaznaczenia | DATAH=XX(H) DANE=YY(H) |
DATA opisuje wartość strefy martwej, jednostka 1m | Sześć bajtów | A5 04 02 00 64 C7 (100 m to najbliższa odległość) |
| 6 | 0x06 | Łączna liczba zapytań dotyczących mocy świetlnej | DATAH=00(H) DANE=00(H) |
Łączna liczba zapytań dotyczących mocy świetlnej | Sześć bajtów | A5 06 02 00 00 A1 |
| 7 | 0x11 | Zasilanie APD jest włączone | DATAH=00(H) DANE=00(H) |
Sześć bajtów | A5 11 02 00 00 B6 | |
| 8 | 0x12 | Zasilanie APD jest wyłączone | DATAH=00(H) DANE=00(H) |
Sześć bajtów | A5 12 02 00 00 B5 | |
| 9 | 0xEB | Zapytanie o numer | DATAH=00(H) DANE=00(H) |
Zapytanie o numer | Sześć bajtów | A5 EB 02 00 00 4C |
a) Główna kontrola odbiera format
Format otrzymanej wiadomości jest następujący:
| STX0 | CMD | LEN | DANE | DANE0 | CHK |
Tabela 4 Opis formatu odbieranych wiadomości
| numer zamówienia | nazwa | wyjaśnić | kod | uwagi |
| 1 | STX0 | Flaga rozpoczęcia wiadomości 1 | A5 (wys.) | |
| 2 | CMD_JG | Słowo polecenia danych | Patrz tabela 5 | |
| 3 | LEN | DL | Liczba wszystkich bajtów z wyjątkiem znaku początkowego, słowa polecenia i sumy kontrolnej | |
| 4 | Dn | parametr | Patrz tabela 5 | |
| 5 | D0 | |||
| 6 | CHK | Weryfikacja XOR | Z wyjątkiem prawidłowego bajtu, wszystkie pozostałe bajty są poddawane operacji XOR |
Opis statusu odbioru głównego sterowania:
Tabela 5 opisuje słowo danych wysłane przez dalmierz do głównego sterownika
| numer zamówienia | CW | funkcjonować | bajt danych | uwagi | długość całkowita |
| 1 | 0x00 | przerwać | D1=00(H) D0=00(H) |
Sześć bajtów | |
| 2 | 0x03 | samosprawdzenie | D8 ~ D1 | D8-D7: napięcie -5 V, jednostka 0,01 V. D6-D5: Wartość martwego punktu, jednostka 1m D4: Wartość wysokiego napięcia APD, jednostka V; D3: typ char, wskazujący temperaturę APD, jednostka: stopnie Celsjusza; D2-D1: napięcie +5 V, jednostka 0,01 V |
12 bajtów |
| 3 | 0x04 | Odległość do najbliższego ustawienia dostępu, jednostka m | D1 D0 | DANE opisują najbliższą wartość odległości, jednostkę 1m; Zacznij wysoko i zakończ nisko |
Sześć bajtów |
| 4 | 0x06 | Łączna liczba zapytań dotyczących mocy świetlnej | D3~D0 | DATA wyraża liczbę świateł, 4 bajty, zaczynając od starszego bajtu | Siedem bajtów |
| 5 | 0x11 | Zasilanie APD jest włączone | D1=00(H) D0=00(H) |
Zasilanie APD jest włączone | Sześć bajtów |
| 6 | 0x12 | Zasilanie APD wyłączone | D1=00(H) D0=00(H) |
Zasilanie APD jest wyłączone | Sześć bajtów |
| 7 | 0xED | Praca w godzinach nadliczbowych | 0x00 0x00 | Laser znajduje się pod ochroną przed działaniem lasera i nie można go zmierzyć. | Sześć bajtów |
| 8 | 0xEE | Błędy efektywności | 0x00 0x00 | Sześć bajtów | |
| 9 | 0XEF | Przekroczono limit czasu komunikacji portu szeregowego | 0x00 0x00 | Sześć bajtów | |
| 10 | 0x01 | Pomiar pojedynczego zasięgu (pojedynczy cel, zero dla drugiego i trzeciego celu, zero dla trzeciego celu na początku i na końcu celu) | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
Odległość pierwszego celu D8-D6 (jednostka 0,1 m) Odległość D5-D3 do drugiego celu (jednostka: 0,1m) Odległość trzeciego celu D2-D0 (jednostka 0,1 m) 3. Cele są od bliskich do dalekich Bajt flagi D9 (bit7-bit0): D9 to siódma pozycja wskazująca falę główną; 1: jest fala główna, 0: nie ma fali głównej. D9 to szósta pozycja wskazująca echo; 1: jest echo, 0: brak echa D9 Piąta pozycja wskazuje stan lasera; 1: normalny laser, 0: awaria lasera D9 to czwarty bit flagi limitu czasu, 1: normalny, 0: limit czasu D9 jest nieprawidłowe na 3. pozycji (ustawione na 1); D9 Druga pozycja wskazuje status APD; 1: normalny, 0: błąd D9 to pierwsza pozycja wskazująca, czy istnieje poprzedni cel; 1: istnieje poprzedni cel, 0: brak poprzedniego celu (cel w martwym obszarze). D9 Bit 0 wskazuje, czy istnieje kolejny cel; 1: jest kolejny cel, 0: nie ma kolejnego celu (cel po celu głównym jest celem kolejnym) |
14 bajtów |
| 11 | 0x02 | Ciągły zakres (pojedynczy cel, zero dla drugiego i trzeciego celu, zero dla trzeciego celu na początku i na końcu celu) | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
Odległość pierwszego celu D8-D6 (jednostka 0,1 m) Odległość D5-D3 do drugiego celu (jednostka: 0,1m) Odległość trzeciego celu D2-D0 (jednostka 0,1 m) 3. Cele są od bliskich do dalekich Bajt flagi D9 (bit7-bit0): D9 to siódmy bit wskazujący falę główną; 1: jest fala główna, 0: nie ma fali głównej. D9 to szósta pozycja wskazująca echo; 1: jest echo, 0: brak echa D9 Piąta pozycja wskazuje stan lasera; 1: normalny laser, 0: awaria lasera D9 to czwarty bit flagi limitu czasu, 1: normalny, 0: limit czasu D9 jest nieprawidłowe na 3. pozycji (ustawione na 1); D9 Druga pozycja wskazuje stan APD; 1: normalny, 0: błąd D9 to pierwsza pozycja wskazująca, czy istnieje poprzedni cel; 1: istnieje poprzedni cel, 0: brak poprzedniego celu (cel w martwym obszarze). D9 Bit 0 wskazuje, czy istnieje kolejny cel; 1: jest kolejny cel, 0: nie ma kolejnego celu (cel po celu głównym jest celem kolejnym) |
14 bajtów |
| 12 | 0xEB | Zapytanie o numer | D17… D0 | D17 D16 D15 D14 D13 D12 Cały kod modelu maszyny D11D10 Numer produktu Wersja oprogramowania D9 D6 D5 D4 Numer APD D3 D2 Numer lasera Wersja D1 FPGA |
22 bajty |
| Uwaga: ① Niezdefiniowany bajt/bit danych, wartość domyślna to 0; | |||||
Aby uzyskać więcej informacji na temat naszych produktów, skontaktuj się z Jioptik.