STA-B40X to ludzki moduł pomiaru odległości lasera, który może wykryć odległość docelową i przesyłać zmierzoną odległość do górnego komputera poprzez komunikację szeregową. Widoczność ≥ 12 km, odbicie docelowe ≥ 0,3, wilgotność ≤ 80%, pojazd (cel 2,3 m × 2,3 m) odległość w zakresie ≥ 4 km.
(1) pojedynczy odległość i ciągłe;
(2) reagowanie na polecenia laserowe i może przestać w dowolnym momencie zgodnie z poleceniem Stop;
(3) dane dotyczące odległości i informacji o stanie raz na impuls podczas pomiaru odległości;
(4) może zgłaszać skumulowaną liczbę przesyłanych impulsów laserowych (brak utraty mocy w dół);
(5) wybór odległości, przednie i tylne wskazanie docelowe;
(6) Funkcja autotestu.
| Przedmiot | Parametr techniczny | Instrukcja |
| Model | STA-B40X | |
| Działająca długość fali | 1535 ± 5 nm | |
| Bezpieczeństwo wzroku | Klasa 1 (IEC 60825-1) | |
| Odbieranie przysłony | Φ16mm | |
| Przysłona emisji | Φ13 mm | |
| Zdolność w zakresie | 30-8000 m | |
| Zakres | ≥8000 m | Max, odbicie: 0,9, widoczność obserwatora 25 km |
| ≥6000 m | Duże cele budowlane, współczynnik odbicia: 0,6, widoczność obserwatora 20 km | |
| ≥4000 m | Cel NATO | |
| ≥2000 m | Ludzki cel | |
| ≥ 1200 m | Cel UAV | |
| Mini zakres | 30m | |
| Wykrywanie wielu celów | Do 3 celu | |
| Rozdzielczość zasięgu | 20m | |
| Dokładność w zakresie | ± 1m | 3d |
| Częstotliwość w zakresie | 1 ~ 10 Hz regulowany | |
| Wskaźnik dokładności | ≥98% | |
| Fałszywa szybkość alarmu | 1% | |
| Kąt rozbieżności | ≤0,6 Mrad | |
| Interfejs komunikacyjny | Ttl | Interfejs RS422/RS232 można dostosować |
| Woltaż | DC4,5 ~ 16 V. | |
| Zużycie energii | ≤1,2 W (@1Hz) | Siła robocza |
| ≤5W@12 V. | Moc szczytowa | |
| Stabilność osi optycznej laserowej | ≤0,05 Mrad | |
| Błąd równoległy | ≤0,3mrad | Błąd równoległości osi optyczny do odniesienia do montażu |
| Szok mechaniczny | 75G, 1 ms | |
| Temperatura pracy | -40 ℃~+70 ℃ | |
| Temperatura przechowywania | -55 ℃~+75 ℃ | |
| Niezawodność | MTBF ≥ 1500H | |
| Rozmiar | ≤19x24x37mm | |
| Waga | ≤50 g | |
| Główna funkcja | Pierwszy i ostatni cel, Wielopasmowy zakres, Selektywność odległości |
|
Uwagi:
1) rozmiar docelowy NATO 2,3 m × 2,3 m; Rozmiar docelowy człowieka 0,5 m × 1,7 m; Rozmiar docelowy UAV 0,2 m × 0,3 m; Reffinktywność 30%, wilgotność ≤80%, widoczność obserwatora ≥ 12 km

| szpilka | definicja | wyjaśnić |
| 1 | GND | Smyczkowy |
| 2 | Moc jest | Zasilacz, od 3 do 5 V |
| 3 | Uart_nc | (pusty) |
| 4 | Uart_tx | Nadajnik portu szeregowego, poziom TTL_3.3v |
| 5 | Uart_rx | Zakończenie portu szeregowego, z poziomem TTL_3.3V |
| 6 | Power_on | Przełącznik zasilania modułu, poziom TTL_3.3V; (> 0,7 V na, domyślnie <0,15 V) |
Interfejs komunikacyjny: UART (TTL_3.3 V), 115200 bps, 1 bit startowy, 8 bitów danych, 1 stop nr, bez parytetu;
Tabela 1 Definicja podstawowa
| Szpilka | Definicja | Kolor linii | Notatki |
| 1 | Zasilacz + | Czerwony | 4,5-16 V. |
| 2 | Zasilacz - | Czarny | GND |
| 3 | Power_on | Biały | Zasilanie poziomu TTL_3.3V, moduł na (> 2,7 V), moduł wyłączony (<0,3 V) |
| 4 | Uart_tx | Żółty | Serial Port Sender |
| 5 | Uart_rx | Zielony | Odbiornik portu szeregowego |
| 6 | GND | Czarny | Podłoże portu szeregowego |
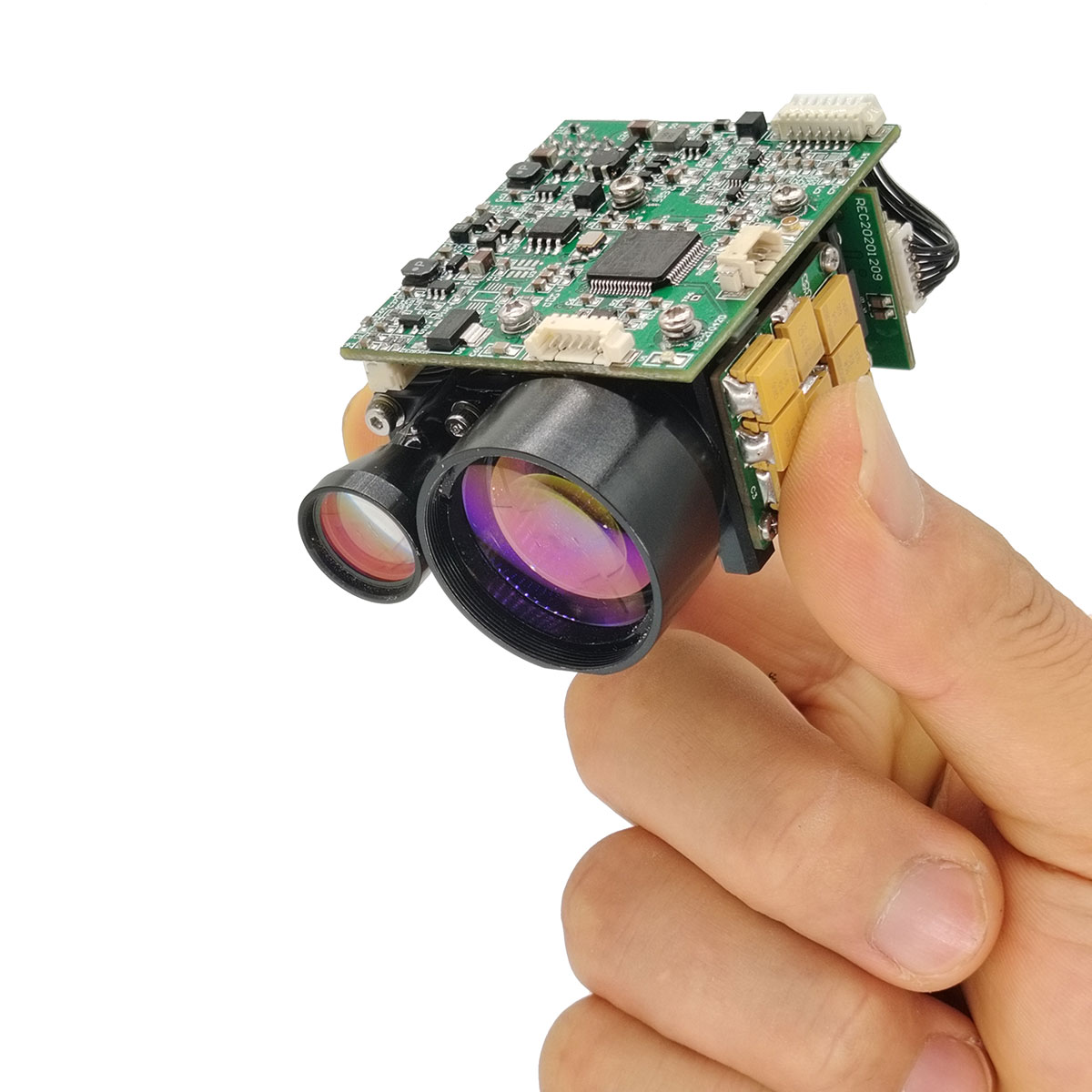
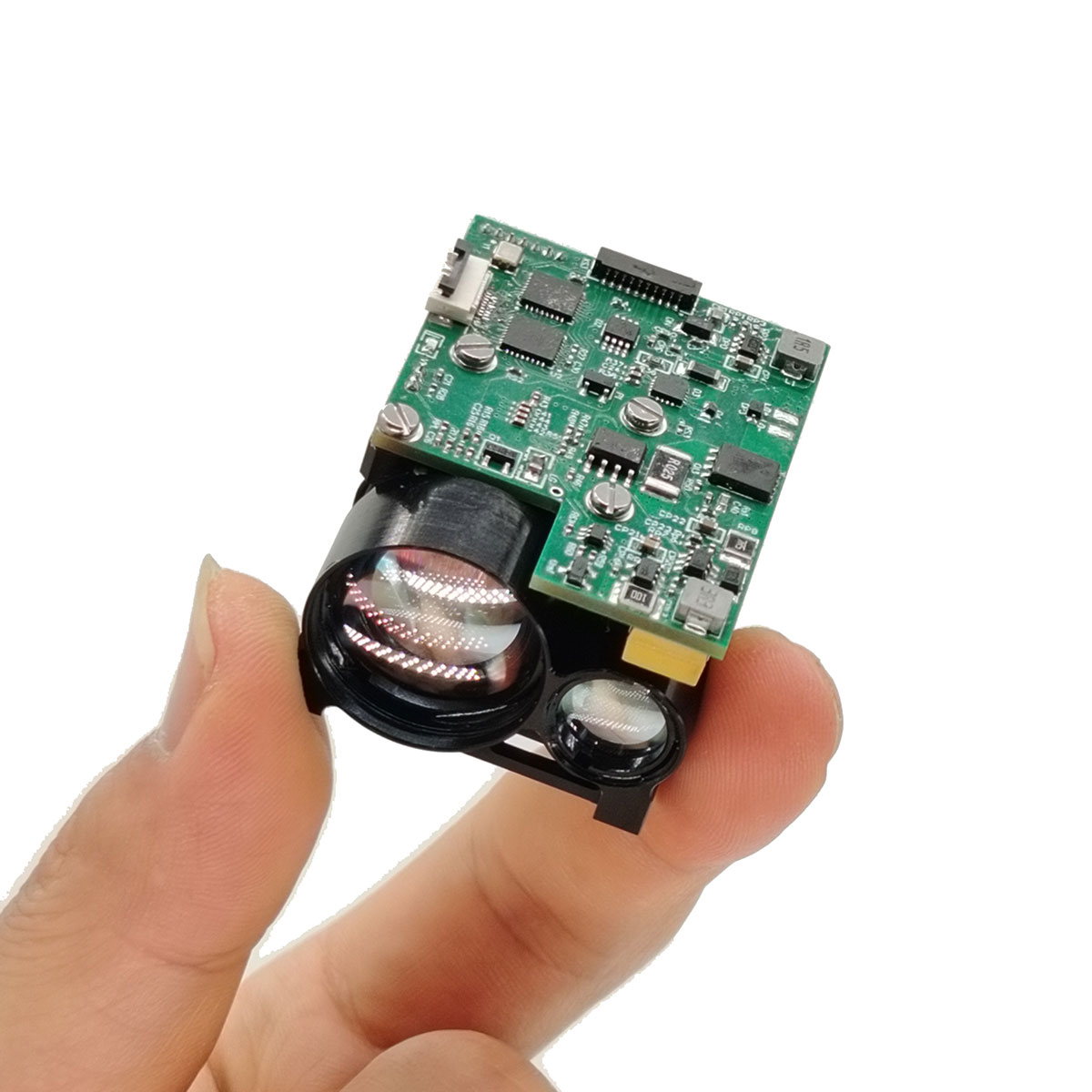
Moduły i niestandardowe rozwiązania OEM/ODM
B40X jest przeznaczony dla integratorów systemów szukających wygodnego, mocnego i kompaktowego rozwiązania laserowego. Zapewnia niezawodną wydajność w szerokim zakresie aplikacji.
Jest bardzo mały, ultra-światło, ma niskie zużycie energii i może być mierzone na dłużej. Jest odpowiedni do urządzeń ręcznych (obrazowanie termiczne), zastosowania montażowe broni, systemy przenośne i lekkie apartamenty czujników oraz bezzałogowe pojazdy powietrzne lub UGV.
1. Protokół transmisji: asynchroniczna komunikacja szeregowa;
2. Stawka portu: 115200;
3. Bity danych: 10 bitów: jeden bit startowy, 8 bitów danych, jeden bit stopu, nieprawidłowa weryfikacja;
4. Struktura danych: Dane składają się z bajtu nagłówka, części poleceń, długości danych, części parametru i bajtu sprawdzania;
5. Tryb komunikacji: Kontrola główna wysyła polecenia sterujące do komputera dystansowego, a komputer odbywa się i wykonuje instrukcje. W stanie dystansowym maszyna do rozbieżności wysyła dane i status maszyny rozmiarowej z powrotem do górnego komputera zgodnie z cyklem dystansowym. Format komunikacji i zawartość poleceń pokazano w poniższej tabeli.
A) Sterowanie główne wysyła
Format przesłania wiadomości jest następujący:
| STX0 | CMD | Len | Data1h | Data1l | Chk |
Tabela 2 Opis formatu wysłanej wiadomości
| numer zamówienia | nazwa | wyjaśnić | kod | uwagi |
| 1 | STX0 | Flaga Start Wiadomość | A5 (H) | |
| 2 | CMD | CW | Patrz Tabela 3 | |
| 3 | Len | Dl | Liczba wszystkich bajtów oprócz znaku początkowego, słowa polecenia i sumy kontrolnej | |
| 4 | Datah | parametr | Patrz Tabela 3 | |
| 5 | przyjazd | |||
| 6 | Chk | Weryfikacja XOR | Z wyjątkiem ważnego bajtu, wszystkie pozostałe bajty są XORED |
Polecenie jest opisane w następujący sposób:
Tabela 3 Opis poleceń i słów danych wysyłanych przez Master na maszynę do odległości
| numer zamówienia | CW | funkcjonować | bajt danych | uwagi | długość | Przykładowy kod |
| 1 | 0x00 | przerwać | Datah = 00 (h) DataL = 00 (H) |
RangeFinder przestaje mierzyć | Sześć bajtów | A5 00 02 00 A7 |
| 2 | 0x01 | Pojedynczy oddział | Datah = 00 (h) DataL = 00 (H) |
Sześć bajtów | A5 01 02 00 00 A6 | |
| 3 | 0x02 | Ciągły odległość | Datah = xx (h) DataL = yy (h) |
Dane opisują okres rozdziału, w MS | Sześć bajtów | A5 02 02 03 E8 4E (1 Hz) |
| 4 | 0x03 | samoocena | Datah = 00 (h) DataL = 00 (H) |
Sześć bajtów | A5 02 02 00 A4 | |
| 5 | 0x04 | Ustaw najbliższą odległość do wyboru | Datah = xx (h) DataL = yy (h) |
Dane opisują wartość strefy niewidomej, jednostka 1M | Sześć bajtów | A5 04 02 00 64 C7 (100m to najbliższa odległość) |
| 6 | 0x06 | Skumulowana liczba zapytań o wyjściowe światła | Datah = 00 (h) DataL = 00 (H) |
Skumulowana liczba zapytań o wyjściowe światła | Sześć bajtów | A5 06 02 00 A1 |
| 7 | 0x11 | APD Power jest włączony | Datah = 00 (h) DataL = 00 (H) |
Sześć bajtów | A5 11 02 00 B6 | |
| 8 | 0x12 | APD Power jest wyłączona | Datah = 00 (h) DataL = 00 (H) |
Sześć bajtów | A5 12 02 00 B5 | |
| 9 | 0xeb | Zapytanie o liczbę | Datah = 00 (h) DataL = 00 (H) |
Zapytanie o liczbę | Sześć bajtów | A5 EB 02 00 00 4C |
a) Kontrola główna odbiera format
Format otrzymanej wiadomości jest następujący:
| STX0 | CMD | Len | Dane | Data0 | Chk |
Tabela 4 Opis formatu otrzymanych wiadomości
| numer zamówienia | nazwa | wyjaśnić | kod | uwagi |
| 1 | STX0 | Wiadomość Start Flag 1 | A5 (H) | |
| 2 | Cmd_jg | Słowo polecenia danych | Patrz Tabela 5 | |
| 3 | Len | Dl | Liczba wszystkich bajtów oprócz znaku początkowego, słowa polecenia i sumy kontrolnej | |
| 4 | Dn | parametr | Patrz Tabela 5 | |
| 5 | D0 | |||
| 6 | Chk | Weryfikacja XOR | Z wyjątkiem ważnego bajtu, wszystkie pozostałe bajty są XORED |
Opis statusu otrzymania kontroli głównej:
Tabela 5 opisuje słowo danych wysyłane przez RangeFinder do kontrolera głównego
| numer zamówienia | CW | funkcjonować | bajt danych | uwagi | całkowita długość |
| 1 | 0x00 | przerwać | D1 = 00 (H) D0 = 00 (H) |
Sześć bajtów | |
| 2 | 0x03 | samoocena | D8 ~ D1 | D8 -D7: -5 V Napięcie, jednostka 0,01 V. D6-D5: wartość martwej plamki, jednostka 1M D4: APD Wartość wysokiego napięcia, jednostka V; D3: typ char, wskazujący temperaturę APD, jednostka: stopnie Celsjusza; D2-D1: +5 V Napięcie, jednostka 0,01 V |
12 bajtów |
| 3 | 0x04 | Odległość do najbliższego ustawienia dostępu, jednostka M | D1 D0 | Dane opisują najbliższą wartość odległości, jednostka 1M; Rozpocznij wysokie i kończą niskie |
Sześć bajtów |
| 4 | 0x06 | Skumulowana liczba zapytań o wyjściowe światła | D3 ~ D0 | Dane wyrażają liczbę świateł, 4 bajty, z pierwszym wysokim bajtem | Siedem bajtów |
| 5 | 0x11 | APD Power jest włączony | D1 = 00 (H) D0 = 00 (H) |
APD Power jest włączony | Sześć bajtów |
| 6 | 0x12 | APD zasilanie | D1 = 00 (H) D0 = 00 (H) |
APD Power jest wyłączona | Sześć bajtów |
| 7 | 0xed | Praca nadgodzin | 0x00 0x00 | Laser jest pod ochroną pracy laserowej i nie można go zmierzyć. | Sześć bajtów |
| 8 | 0xee | Błędy skuteczności | 0x00 0x00 | Sześć bajtów | |
| 9 | 0xef | Limit czasu komunikacji portu szeregowego | 0x00 0x00 | Sześć bajtów | |
| 10 | 0x01 | Pomiar pojedynczego zakresu (pojedynczy cel, zero dla drugiego i trzeciego celu, zero dla trzeciego celu na początku i na końcu celu) | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
D8-D6 Pierwsza odległość docelowa (jednostka 0,1 m) Odległość D5-D3 do drugiego celu (jednostka: 0,1 m) D2-D0 trzecia odległość docelowa (jednostka 0,1 m) 3. Cele są od bliska D9 (bit7-bit0) bajt flagowy: D9 to 7. pozycja wskazująca falę główną; 1: Istnieje fala główna, 0: Brak fali głównej. D9 to szósta pozycja wskazująca ECHO; 1: Jest echo, 0: bez echa D9 Piąta pozycja wskazuje status lasera; 1: Normalny laser, 0: Wad laserowy D9 to czwarta flaga limitu czasu, 1: normalna, 0: limit czasu D9 jest nieprawidłowy w trzeciej pozycji (ustawiony na 1); D9 Druga pozycja wskazuje status APD; 1: Normal, 0: Błąd D9 jest pierwszą pozycją wskazującą, czy istnieje poprzedni cel; 1: Istnieje poprzedni cel, 0: Brak poprzedniego celu (cel w obszarze niewidomy). D9 0. bit wskazuje, czy istnieje późniejszy cel; 1: Istnieje późniejszy cel, 0: Brak kolejnego celu (celem po głównym celu jest późniejszy cel) |
14 bajtów |
| 11 | 0x02 | Ciągły odległość (pojedynczy cel, zero dla drugiego i trzeciego celu, zero dla trzeciego celu na początku i na końcu celu) | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
D8-D6 Pierwsza odległość docelowa (jednostka 0,1 m) Odległość D5-D3 do drugiego celu (jednostka: 0,1 m) D2-D0 trzecia odległość docelowa (jednostka 0,1 m) 3. Cele są od bliska D9 (bit7-bit0) bajt flagowy: D9 to 7. bit wskazujący na falę główną; 1: Istnieje fala główna, 0: Brak fali głównej. D9 to szósta pozycja wskazująca ECHO; 1: Jest echo, 0: bez echa D9 Piąta pozycja wskazuje status lasera; 1: Normalny laser, 0: Wad laserowy D9 to czwarta flaga limitu czasu, 1: normalna, 0: limit czasu D9 jest nieprawidłowy w trzeciej pozycji (ustawiony na 1); D9 Druga pozycja wskazuje stan APD; 1: Normal, 0: Błąd D9 jest pierwszą pozycją wskazującą, czy istnieje poprzedni cel; 1: Istnieje poprzedni cel, 0: Brak poprzedniego celu (cel w obszarze niewidomy). D9 0. bit wskazuje, czy istnieje późniejszy cel; 1: Istnieje późniejszy cel, 0: Brak kolejnego celu (celem po głównym celu jest późniejszy cel) |
14 bajtów |
| 12 | 0xeb | Zapytanie o liczbę | D17 …… D0 | D17 D16 D15 D14 D13 D12 Cała maszyna kod modelu D11D10 Numer produktu Wersja oprogramowania D9 D6 D5 D4 APD D3 D2 Numer Wersja D1 FPGA |
22 bajtów |
| Uwaga: ① Niezdefiniowany bajt/bit, domyślnie to 0; | |||||
Aby uzyskać więcej informacji na temat naszych produktów, skontaktuj się z Jioptik.