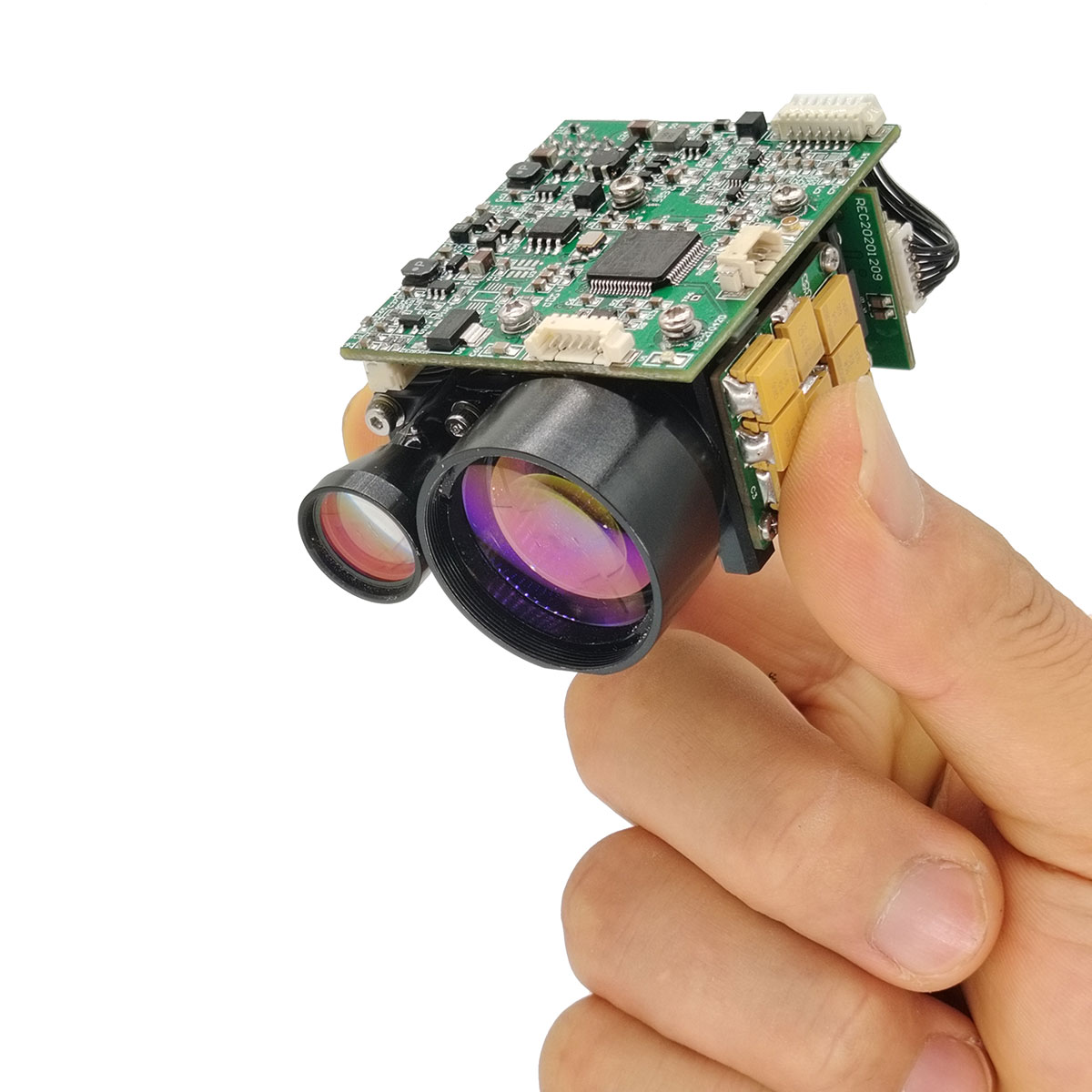
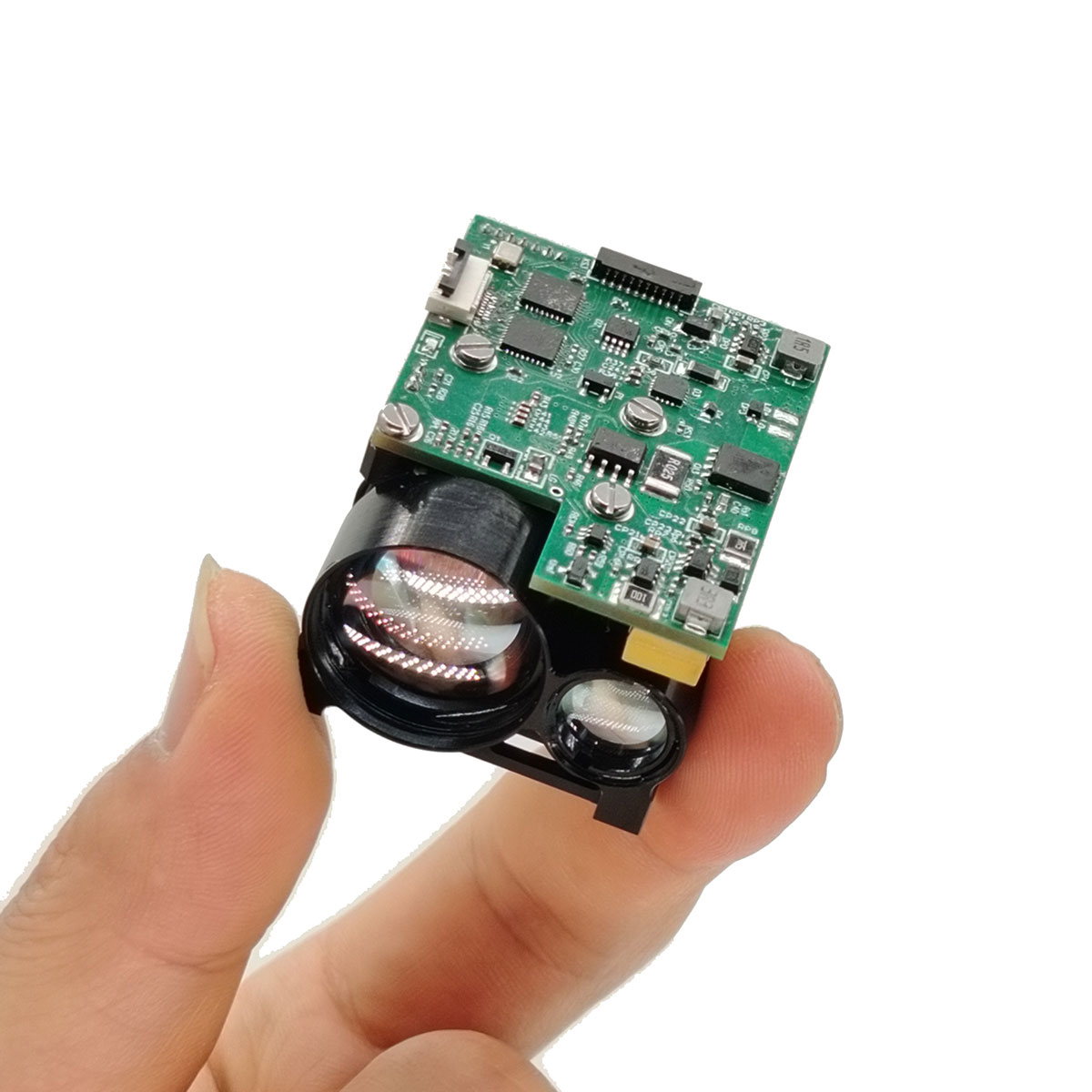
● Jako profesjonalny producent chcielibyśmy zapewnić moduł dalmierza laserowego o zasięgu 20 km. Moduł dalmierza laserowego STA-C2030X wykorzystuje samodzielnie opracowany element lasera ze szkła erbowego o długości 1535 nm, który charakteryzuje się dużym zasięgiem, niskim zużyciem energii, niewielkim rozmiarem i bezpieczeństwem ludzkiego oka.
● Zasięg: 20000 m (cel NATO), 30000 m (maksymalny zasięg)
● Dokładność pomiaru ± 1m
● Dokładność pomiaru ≥ 98%
● Waga ≤ 380g
Moduł dalmierza laserowego STA-C2030X o zasięgu 20 km z ochroną oczu charakteryzuje się bezpieczną konstrukcją, lekką konstrukcją, zmniejszonym zużyciem energii, dłuższą żywotnością i szerokim zakresem temperatur. Ten moduł dalmierza laserowego, szeroko stosowany w zadaniach takich jak rozpoznanie, pomiary i mapowanie, jest pozbawiony obudowy, ale zapewnia różnorodny zakres interfejsów umożliwiających łatwą integrację z różnymi systemami. Użytkownicy korzystają z wygody oprogramowania komputerowego i protokołów komunikacyjnych, zwiększając użyteczność urządzeń przenośnych i systemów wielofunkcyjnych.
Odległość pojedynczego strzału i odległość ciągła
Wykrywanie 3 celów, wskazanie celu z przodu i z tyłu
Zawiera funkcję samokontroli
Funkcja Wake-on-lan
Liczba emitowanych impulsów podczas MNBF ≥1×106razy
Urządzenia przenośne
Bezzałogowy statek powietrzny
Kapsuła elektrooptyczna
Nadzór graniczny
| Projekt | Wskaźniki wydajności | |
| Model | STA-C2030X | |
| Długość fali lasera | 1535 ± 5 nm | |
| Bezpieczeństwo oczu | Klasa Ⅰ (IEC 60825-1) | |
| Kąt rozbieżności | ≤0,3 mrada | |
| Odbierane pole widzenia (FOV) | ~ 1,8 mrada | |
| Uruchom opcję Średnica obiektywu | Φ18mm | |
| Średnica soczewki odbiornika | Φ60mm | |
| Zakres pomiarowy (odbicie 30%; widoczność ≥28 km) | Zasięg MAX | ≥30000 m |
| Duży cel | ≥23000 m | |
| Cel NATO | ≥20000 m | |
| Ludzie (0,5 m × 1,7 m) | ≥11000 m | |
| UAV (0,2 x 0,3 m) | ≥4000 m | |
| Minimalny zasięg | 50 m | |
| Częstotliwość zakresowa | 0,5 ~ 10 Hz | |
| Dokładność zasięgu | ±1 m | |
| Rozdzielczość zakresu | ≤30 m | |
| Szybkość precyzji | ≥98% | |
| Liczba fałszywych alarmów | ≤1% | |
| Liczba wykryć obejmujących wiele celów | Do 3 celów | |
| Interfejs elektryczny | molex-532610771 | |
| Napięcie zasilania | DC12 V | |
| Pobór mocy w trybie gotowości | ≤1,2 W | |
| Średnie zużycie energii | ≤2 W | |
| Szczytowe zużycie energii | ≤3W | |
| Waga | ≤380g | |
| Wymiary (dł. × szer. × wys.) | 125mm×100mm×70mm | |
| Temperatura pracy | -40~+70 ℃ | |
| Temperatura przechowywania | -55~+75 ℃ | |
| Odporność na uderzenia | 1200 g/1 ms (GJB150. 16A-2009) | |
| Antywibracje | 5~50~5 Hz ,1 zakres oktawy/min ,2,5 g | |
| Zaawansowana logika | Pierwszy i ostatni cel, zasięg wielu celów, selektywność na odległość | |
| Czas aktywacji | ≤950 ms | |
| Interfejs danych | RS422 | |
| Izolacja elektryczna | Izolacja uziemienia zasilania, uziemienia komunikacyjnego i uziemienia konstrukcji | |
| Niezawodność | MTBF ≥ 1500h | |
| Stabilność osi optycznej | ≤0,05 mrad | |
| Brak równoległości pomiędzy osią optyczną a powierzchnią montażową | ≤0,5 mrada | |
| Klasa ochrony | IP67 | |
| Klasa ESD | (Położenie obiektywu) Wyładowanie kontaktowe 6kV Wyładowanie powietrzne 8kV |
|
| Kompatybilność elektromagnetyczna (EMC) | Certyfikat CE/FCC | |
| Ekologiczny | RoHS2.0 | |

Model złącza elektrycznego: J30J; Odpowiednie wtyczki i kable zostaną dostarczone przez Stronę B. Szczegółową definicję interfejsów elektrycznych przedstawiono w poniższej tabeli:
Tabela 1 Definicja interfejsu
| Szpilka | Definicja |
| 1 | GND |
| 2 | GND |
| 3 | GND |
| 4 | VCC 12 V |
| 5 | VCC 12 V |
| 6 | RS422 RX+ |
| 7 | RS422 RX- |
| 8 | RS422 TX- |
| 9 | RS422TX+ |
Transmisja danych pomiędzy dalmierzem a górnym komputerem obejmuje:
Polecenia sterujące: w tym pomiar odległości początkowej, ciągły pomiar odległości, pojedynczy pomiar odległości, polecenia zapytania itp.
Dane zwrotne: w tym informacje o odległości, temperaturze otoczenia, stanie dalmierza itp. Wymiana danych pomiędzy dalmierzem a górnym komputerem odbywa się za pośrednictwem magistrali 422. Konkretny protokół komunikacyjny oprogramowania jest następujący:
Format komunikacji: komunikacja RS422, prędkość transmisji 115200bps;
Format danych: dane 8-bitowe, jeden bit startu, jeden bit stopu, bez kontroli parzystości. Dane składają się z bajtu nagłówka, części polecenia, długości danych, części parametru i bajtu sumy kontrolnej.
Metoda komunikacji: Sterowanie główne i dalmierz wykorzystują metodę komunikacji master-slave. Sterowanie główne wysyła polecenia sterujące do dalmierza, a dalmierz odbiera i wykonuje polecenia. W stanie ustalania odległości dalmierz wysyła dane i status dalmierza do górnego komputera zgodnie z cyklem wyznaczania odległości. Format komunikacji i treść poleceń przedstawiono w poniższej tabeli.
Mistrz wysyła
Format wysyłanej wiadomości jest następujący:
| STX0 | CMD | LEN | DANE 1H | DANE 1L | CHK |
Wyślij opis formatu wiadomości
Tabela 2 Opis formatu wysyłania wiadomości
| NIE. | Nazwa | zilustrować | Kod | Uwaga |
| 1 | STX0 | Flaga rozpoczęcia wiadomości | 55(H) | |
| 2 | CMD | Słowo polecenia | Patrz tabela 3 | |
| 3 | LEN | Długość danych | Liczba wszystkich bajtów z wyjątkiem flagi początkowej, słowa polecenia i sumy kontrolnej | |
| 4 | DANE | parametr | ||
| 5 | przyjazd | |||
| 6 | CHK | Kontrola XOR | Z wyjątkiem bajtu sprawdzającego, inne bajty są poddawane operacji XOR |
Polecenie jest opisane w następujący sposób:
Tabela 3 Opis poleceń i słów danych przesyłanych przez sterowanie główne do maszyny do pomiaru odległości
| NIE. | Słowo polecenia | Funkcje | Bajt danych | Uwagi | Długość | przykładowy kod (obliczenia) |
| 1 | 0x00 | Gotowość (ciągłe zatrzymanie zakresu) |
DANE=00(H) DANE=00(H) | Dystans zmierzenie maszyna przestaje działać |
6 bajtów | 55 00 02 00 00 57 |
| 2 | 0x01 | Pojedynczy zakres | DANE=00(H) DANE=00(H) | 6 bajtów | 55 01 02 00 00 56 | |
| 3 | 0x02 | Ciągłe wahanie | DANE=XX(H) DANE=YY(H) | DANE wyraża okres rozpiętości w ms. |
6 bajtów | 55 02 02 03 E8 BE (zakres 1 Hz) |
| 4 | 0x03 | Autotest | DANE=00(H) DANE=00(H) | 6 bajtów | 55 03 02 00 00 54 | |
| 5 | 0x04 | Wybór odległości i najbliższego ustawienie odległości |
DANE=XX(H) DANE=YY(H) | DANE wyraża strefę niewidomych wartość, jednostka 1m |
6 bajtów | 55 04 02 00 64 37 (100m najbliżej) |
| 6 | 0x06 | Łączny liczba zapytań o zgaszenie światła |
DANE=00(H) DANE=00(H) | Łączny liczba zapytań o zgaszenie światła |
6 bajtów | 55 06 02 00 00 51 |
| 7 | 0x11 | Zasilanie APD włączone | DANE=00(H) DANE=00(H) | 6 bajtów | 55 11 02 00 00 46 | |
| 8 | 0x12 | Zasilanie APD wyłączone | DANE=00(H) DANE=00(H) | 6 bajtów | 55 12 02 00 00 45 | |
| 9 | 0xEB | Zapytanie o numer | DANE=00(H) DANE=00(H) | 6 bajtów | 55 EB 02 00 00 p.n.e |
l Główny format odbioru
Format odbieranej wiadomości jest następujący:
| STX0 | CMD | LEN | DANE | DATA0 | CHK |
Tabela 4 Opis formatu odbieranej wiadomości
| NIE. | Nazwa | Opis | Kod | Uwagi |
| 1 | STX0 | Flaga rozpoczęcia wiadomości 1 | 55(H) | |
| 2 | CMD_JG | Słowo polecenia danych | Patrz tabela 5 | |
| 3 | LEN | Długość danych | Liczba wszystkich bajtów z wyjątkiem flagi początkowej, słowa polecenia i sumy kontrolnej | |
| 4 | Dn | Parametr | Patrz tabela 5 | |
| 5 | D0 | |||
| 6 | CHK | Suma kontrolna | Wszystkie bajty z wyjątkiem bajtu parzystości |
Master otrzyma opis statusu:
Tabela 5 Opis słowa danych przesłanego z ran efindera do głównego układu sterowania
| NIE. | słowo rozkazu | Funkcje | Bajt danych | Uwagi | Całkowita długość | ||
| 1 | 0x00 | Tryb gotowości (ciągłe zatrzymanie zakresu) | D1=00(H) D0=00(H) | 6 bajtów | |||
| 2 | 0x03 | Autotest | D7~D0 | D0: typ char, wskazuje temperaturę APD w stopniach Celsjusza; D1: Wartość wysokiego napięcia APD, jednostka V; D3-D2: wartość ślepa, jednostka 1m D5-D4: napięcie -5 V, jednostka 0,01 V. D7-D6: napięcie +5 V, jednostka 0,01 V |
12 bajtów | ||
| 3 | 0x04 | Ustawienie najbliższej odległości do opt-in, jednostka m | D1 D0 | DANE wyrażają najbliższą wartość odległości w 1m; Najpierw wysoko, potem nisko |
6 bajtów | ||
| 4 | 0x06 | Łączna liczba zapytań o wyłączenie światła | D3~D0 | DANE wyrażają liczbę emisji światła, 4 bajty, starszy bajt jest pierwszy | 8 bajtów | ||
| 5 | 0x11 | Zasilanie APD włączone | DANE=00(H) DANE=00(H) | APD pod wysokim napięciem | 6 bajtów | ||
| 6 | 0x12 | Zasilanie APD wyłączone | DANE=00(H) DANE=00(H) | APD bez wysokiego napięcia | 6 bajtów | ||
| 7 | 0xED | Przerwa w pracy | 0x00 0x00 | Laser znajduje się w zabezpieczeniu laserowym i nie może zmierzyć odległości. | 6 bajtów | ||
| 8 | 0xEE | Błąd walidacji | 0x00 0x00 | 6 bajtów | |||
| 9 | 0XEF | Przekroczono limit czasu komunikacji szeregowej | 0x00 0x00 | 6 bajtów | |||
| 10 | 0x01 | Pojedynczy pomiar odległości | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
Odległość pierwszego celu D8-D6 (jednostka 0,1 m) Odległość drugiego celu D5-D3 (dane wynoszą 0 w przypadku pojedynczego celu) (jednostka 0,1 m) Odległość trzeciego celu D2-D0 (dane wynoszą 0 w przypadku pojedynczego celu) (jednostka 0,1 m) 3 cele od blisko do daleko D9 (bit7-bit0) bajt flagi: D9 bit 7 wskazuje falę główną; 1: z falą główną, 0: bez fali głównej. D9 bit 6 wskazuje falę powrotną; 1: z falą powrotną, 0: bez fali powrotnej D9 bit 5 wskazuje stan lasera; 1: laser normalny, 0: awaria lasera D9 bit 4 alarm przekroczenia limitu czasu; 1 normalny, 0 przekroczenie czasu D9 bit 3 nieprawidłowy, = 1 D9 bit 2 wskazuje status APD; 1: normalny, 0: błąd D9 bit 1 wskazuje, czy istnieje pierwszy cel; 1: cel, 0: brak celu (cel wcześniej główny cel jest poprzednim celem) D9 bit 0 wskazuje, czy następuje cel; 1: z celem, 0: bez celu (the cel po głównym celu jest celem późniejszym) |
14 bajtów | ||
| 11 | 0x02 | Ciągły pomiar odległości | D9 D8 D7 D6 D5 D4 D3 D2 D1 D0 |
Odległość pierwszego celu D8-D6 (jednostka 0,1 m) Odległość drugiego celu D5-D3 (dane wynoszą 0 w przypadku pojedynczego celu) (jednostka 0,1 m) Odległość trzeciego celu D2-D0 (dane wynoszą 0 w przypadku pojedynczego celu) (jednostka 0,1 m) 3 cele od blisko do daleko D9 (bit7-bit0) bajt flagi: D9 bit 7 wskazuje falę główną; 1: z falą główną, 0: bez fali głównej. D9 bit 6 wskazuje falę powrotną; 1: z falą powrotną, 0: bez fali powrotnej D9 bit 5 wskazuje stan lasera; 1: laser normalny, 0: awaria lasera D9 bit 4 alarm przekroczenia limitu czasu; 1 normalny, 0 przekroczenie czasu D9 bit 3 nieprawidłowy, = 1 D9 bit 2 wskazuje status APD; 1: normalny, 0: błąd D9 bit 1 wskazuje, czy istnieje pierwszy cel; 1: cel, 0: brak celu (cel przed głównym celem to poprzedni cel) D9 bit 0 wskazuje, czy następuje cel; 1: z celem, 0: bez celu (the cel po głównym celu jest celem późniejszym) |
14 bajtów | ||
| 14 | 0xEB | Wyszukiwanie numerów | D16 … … D0 | D15 D12 Kompletny model D11 D10 Numer produktu D9 D6 Wersja oprogramowania D5 D4 Numer APD D3 D2 Numer lasera D1 D0 Wersja FPGA |
20 bajtów | ||
| Uwagi: ① Niezdefiniowany bajt/bit danych, wartość domyślna to 0; | |||||||
Aby uzyskać więcej informacji na temat naszych produktów, skontaktuj się z Jioptik.